
先日、Traverseのモーター駆動メッセージを解析して遊んでいたので、あぷらなーとさんの「トラバースを『まちがった運用』で楽しむ」を読んで、創作意欲を刺激されてしまい、赤道儀化にチャレンジしてみようと思いました。
AZ-GTiの経験から、Traverse(以下「マウント」)とSynScanApp Pro(以下「アプリ」)の通信の間に割り込んで、赤道儀フラグを立てたところ、アプリは赤道儀も選べるようになりました。(この仕様はManual: Sky-Watcher Motor Controller Command Set に掲載されています。)
変更点① アプリからの「:q1010000」に対する返事「=008000」に赤道儀対応フラグ(2文字目のビット4)を立てて「=088000」に偽装する。
ところが、赤緯軸が逆に動く・・・・
ところが、赤緯軸の動きが逆で、アライメントと導入が明後日の方向を向いてしまいます。モーターを動かすコマンドを無理やり反転してみましたが、アライメントと導入にはモーターを動かすコマンドは使っておらず、別のコマンドを使っているようで、全く解決しませんでした。
大量にログを取って実験・分析
通信仕様が分からない以上、いろいろ実験をして通信ログ取り、そこから分析、推測、するしかありませんが、闇雲にデータを取ってもカオスすぎて分からなくなります。
そこであぷらなーとさんに習って現在地を北極点にし、赤緯軸のみをGoToで1度刻み、1分刻み、1秒刻みのように一定の規則で動かして通信データを取ります。
通信ログから取得したデータと、Gotoで指定した赤緯座標とをプロットしてみると、なんと直線状に分布しているではないですか!!
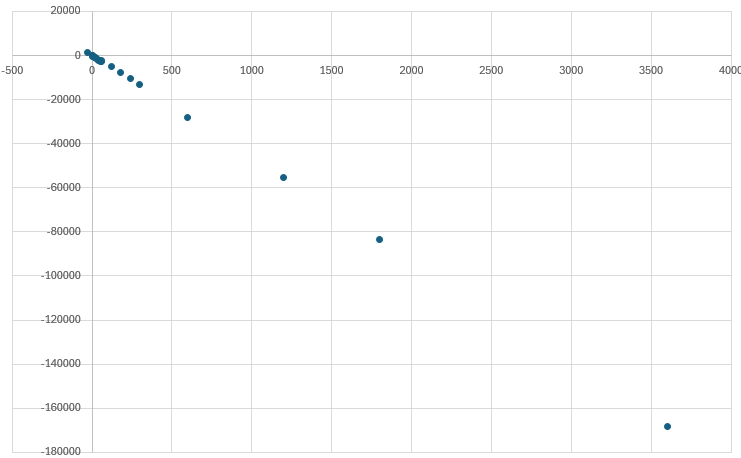
これは規則的なので、いわゆる比例定数から「1度あたりのステップ数」と「360度あたりのステップ数」を逆算。通信ログ中にそれらしい数値はないか探してみると、接続開始直後にやりとりする値の一つが「360度あたりのステップ数」と非常に近い。しかもどの通信ログを見ても、その数値は不変。
これは接続開始時に「赤緯軸360度に対するステップ数」が送られているに違いない。
そこで、その数値の正負を逆に偽装してみたところ、ついに赤緯軸の回転方向が反対になりました!!
変更点② アプリからの「:X20002」に対する返事「000F865B」(10進数で+1017435)の符号を逆にして「FFF079A5」(10進数で-1017435) に偽装する
動作検証
赤緯軸の動きが反対になったので、これで赤道儀として動くかどうか、検証です。
赤道儀対応ファームウェアを入れたAZ-GTi を「 お手本」として、それと同じ動きをすれば赤道儀として問題ないだろうということで、まずは室内にてAZ-GTiとTraverseを並べ、どちらもそれぞれSynScanProアプリをつないで同時に操作します。
この動画は
ベガ(アライメント)⇒レグルス⇒アンタレス⇒スピカ⇒アークトゥルス⇒アンタレス⇒北極星
と動かしたタイムラプス(10倍速)です。
結果、赤道儀化したAZ-GTiと同じ動きをし、同じ方向を向きました!
ということで、Traverseの赤道儀化は成功!と言えそうです。
通信変更内容・試作アプリ
今回のテスト用に作ったトラバースを赤道儀化する試作アプリ(Windowsアプリ)は、数日中に公開予定です。
何て名前にしようか考え中。
まとめ
TRAVERSEをSynScanAppで赤道儀として動かす為には、以下の2点が必要です。
1)「:q1010000」に対する返事に赤道儀対応フラグ(2文字目のビット4)を立てる。
2)「:X20002」に対する返事の符号を逆にする